Troy Harvey at ASHRAE 2022: Meeting and Exceeding Level 5 Autonomy
Last month, PassiveLogic CEO Troy Harvey attended the 2022 ASHRAE Conference in Toronto. An official member of ASHRAE, Troy participated in the seminar “The Future of Controls: Transition from Algorithmic to Predictive Control” — moderated by Paul Ehrlich, P.E. of Building Intelligence Group and featuring Draguna Vrabie, Ph.D of Pacific Northwest National Laboratory along with Jayson Bursill, Ph.D of Delta Controls Inc.
As part of the seminar, Troy Harvey presented on the topic “Digital-Twin Based Control Technology Enables Fully Autonomous Building Systems: Meeting and Exceeding Level 5 Autonomy.” In his presentation, Troy discussed the challenges created by today’s building controls systems “[that] use century-old algorithmic control schemes and manually programmed state machine sequences… [resulting in] an intractable task that leads to many commonly experienced market challenges.” As a solution to this technological inadequacy, Troy advocated for “autonomous building systems built on digital twins” as the key to enabling “optimality, comfort, energy efficiency achievable goals” in buildings.
Troy’s presentation was divided into three parts: Outlining and defining levels of autonomy, a discussion on entropy and emergent behavior, and a comparison of the methods for building controls available to us today.
Section 1 — Levels of Autonomy
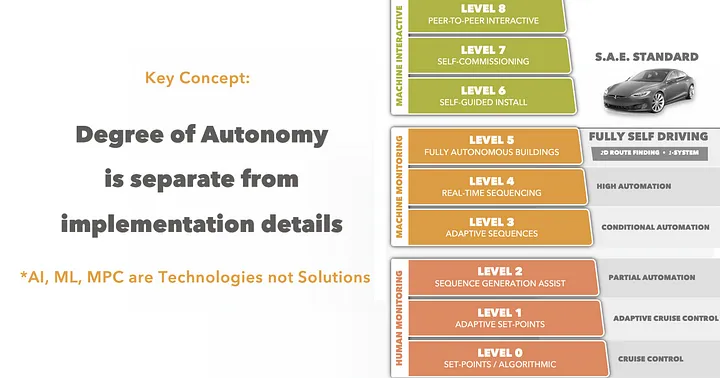
The levels of autonomy as defined by the Society of Automative Engineers (SAE).
Troy’s presentation began with an introduction on the levels of autonomy, how we define these levels, and how systems can ascend these levels from current algorithmic control methods to autonomous systems that can program their own behaviors based on given model information.
For reference, level 0 autonomy is built on static algorithmic or set-point constructs — a familiar example of this being the cruise control on a car. Activating cruise control allows a driver to maintain a consistent speed, yet reaching this state requires the driver to manually set a desired speed and to manually adjust or end cruise control when necessary.
By comparison, jumping to level 5 autonomy is akin to self-driving cars; a driver hops in the car, and the car only needs to know the destination to operate on its own. In buildings, we have a similar challenge: we want a building to navigate its own systems into some point in the future, while meeting standards for both energy efficiency requirements and occupant needs.
Section 2 — A Discussion on Entropy and Emergent Behavior
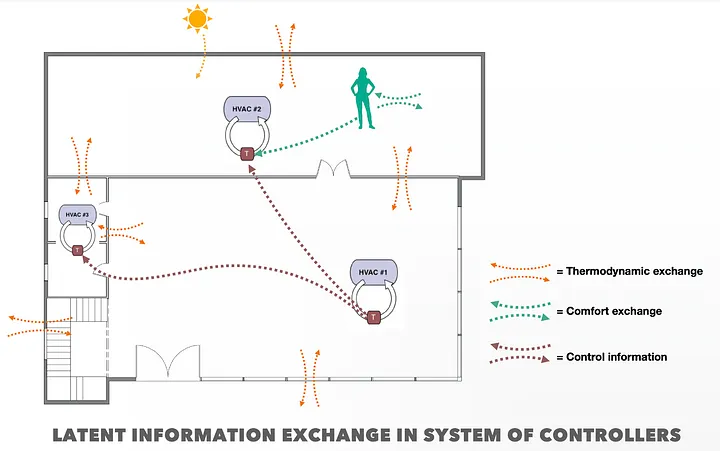
Future-forward building controls must be able to account for every possible interaction between systems — including factors such as weather and occupants — and how these interactions affect a building environment.
As we begin to analyze the systems of systems present in buildings, we see exponentially increasing complexity and emergent behaviors that become very difficult to account for. A single commercial building can have thousands of possible inputs and outputs, the permutations of which become very difficult to handle. Approaching this challenge requires (a) tools that enable observability: by identifying the most important variables, we can reverse the increasing rate of complexity (i.e. entropy); and (b) tools for controllability: which allows us to contain the emergent behaviors from interactions between systems.
Addressing this observability challenge requires a robust data framework — a structure of everything happening in a building via a physics-based digital twin that draws the dots between buildings, their environments, their systems, and their occupants. The next step in enhancing observability requires taking this framework and layering on top a future forward deep learning control engine — one with a fast-acting AI created via new techniques in differentiable programming. This engine can then use a digital twin model to quickly simulate future scenarios, thus handling decisions in emergent behaviors between groups of systems.
Section 3 — Methods of Controls
The final section of Troy’s presentation compared and contrasted the three main methods for controls that we see today: algorithmic controls, model predictive controls, and autonomous system-based controls.
Algorithmic controls are based on lengthy and tedious manual programming of (usually) PID loops, a methodology that was never designed to describe the operational and environmental intricacies of buildings. Algorithmic controls are not only inadequate in the modern age, but an obstacle to the implementation of smarter controls.
With model predictive controls, a machine learning algorithm finds a control path based on a manually generated, static model that must be designed on a project-by-project basis. When conditions change (which occurs constantly for buildings) the model needs to change. Current systems are not nearly quick enough to keep pace with this change, and as a result any new model created is made obsolete by continuously evolving conditions.
With autonomous systems, there is still an initial model generation process, but the time to create such models is drastically shorter because the control engine can provide generative design adaptations. With an autonomous system, control simulations take only a few short seconds, not weeks. When conditions change, the control engine can self-introspect and generate its own updated model and adapt over time.
The Main Idea
The building controls of today are built on static programming sequences, and as such are incapable of keeping up with the needs of building owners, building managers, and their occupants. Addressing the informational limitations related to building thermodynamics, occupancy comfort, and interactions between systems requires creating a control platform that is able to make systems ‘knowable’ by providing them an understanding of themselves based on the ontological properties of systems and their surrounding environment.
In order to reach modern building standards of energy efficiency, operational costs, and occupancy comfort, building controls need to advance beyond the set-point controls of level 0 autonomy. As discussed by Troy Harvey in his presentation, advancing to level 5 autonomy in building controls can be accomplished through the creation of technology specifically designed for buildings.
Learn more about us at PassiveLogic.com
